MTH E94
Projekte > Decoderumbau
Zunächst habe ich die Maschine natürlich auf meiner Anlage fahren lassen. Das ging auch ganz gut, das Teil hat mit seinen zwei Motoren eine extreme Zugkraft:

Die Lok zieht auf dem Bild 32 Güterwagen über eine Steigung mit 2,5% und R1 Radien. Die ersten Güterwagen nach der Lok fingen schon an zu entgleisen weil der Zug zu groß wurde. Die Stromaufnahme konnte ich dabei nicht messen, die sollte aber nach mehr als 3A tendieren. Weil ich aber grundsätzlich alle MTH Loks mit ESU-Decodern ausrüste, wurde das Schwein als nächstes geschlachtet:
Ich habe rigoros die originale Elektrik entfernt, nur die Pantografenantriebe im Gehäuse und die Anschlussplatinen der Beleuchtung auf den Vorbauten habe ich weiterverwendet. Auf dem Bild nicht zu sehen, aber hier sitzt auch das größte Problem bei einem Decodertausch. MTH verwendet nicht einen gemeinsamen Pluspol für die zweifarbige Beleuchtung, sondern einen gemeinsamen Minuspol. Weil aber die Ausgänge eines ESU-Decoders nach Minus schalten (und auch alle anderen Decoder, die ich kenne) funktioniert das nicht. Das gleiche Problem hatte ich auch beim Umbau meiner BR44 und meines Taurus. Also musste eine Schaltung her, die die Verhältnisse umkehrt - das Auswechseln der rot/weißen LED ist nämlich die Hölle. Ich habe dafür Optokoppler verwendet, bei denen die Anode der LED über einen Vorwiderstand 1K an U+ des Decoders angeschlossen sind. Die Kathoden der LED sind mit den Ausgängen des Decoders verbunden. Schaltet nun ein Ausgang, leuchtet die LED auf (kann man natürlich nicht sehen, weil im Gehäuse des Optokopplers). Der Phototransistor im Optokoppler wird dadurch leitend und der Strom fließt von U+ über den Kollektor des Transistors zum Emitter und von da über einen Vorwiderstand von 1K zur Anode der LED in der Lampe und von der Kathode der LED zum GND-Anschluss des Decoders. Alles klar? Damit sind die Verhältnisse umgekehrt und die Beleuchtung funktioniert. Bevor mir die Elektroniker schreiben: man kann statt der Optos natürlich auch PNP-Transistoren verwenden, die sind mir aber unsymphatisch und die Verhältnisse mit Optokopplern sind für mich klarer.
So etwas kann man natürlich nicht fliegend verdrahten, deshalb habe ich eine Platine entworfen, auf die der Decoder (ein ESU Loksound 5.0 XL) aufgesteckt wird. Die Platinen lasse ich professionell in China produzieren.

Die Platine kann alle Funktionen der Lok ansteuern, einschließlich der elektrischen Kupplungen, Beleuchtung und der Original-Pantografenantriebe. Alle Verbindungen zur Lok werden über Steckverbinder hergestellt, die im Lieferumfang enthalten sind. Für den Umbau sind etwas Geschick, Sorgfalt und Kenntnisse im Löten erforderlich.
Zunächst wird die Lok geöffnet. Dazu kann Sie mit dem Dach auf ein Stück Styrodur gelegt werden, so dass die Pantografen frei sind und nicht belastet werden. An beiden Vorbauten werden von unten 4 Schrauben entfernt, dabei den Vorbau festhalten. Mit der Lok sind die Vorbauten jeweil mit zwei Kabeln verbunden, den zugehörigen Stecker abziehen. Weil die Vorbauten nicht gleich sind, empfiehlt es sich, den Vorbau an Führerstand 1 zu markieren.
Das Gehäuse der Lok ist mit 4 größeren Schrauben am Rahmen befestigt, diese entfernen. Dann die Lok vorsichtig auf die Räder stellen und das Gehäuse nach oben abziehen. Die grauen und grünen Kabel, die zu den Pantografenantrieben führen, am Decoder abschneiden. Gehäuse beiseite stellen.
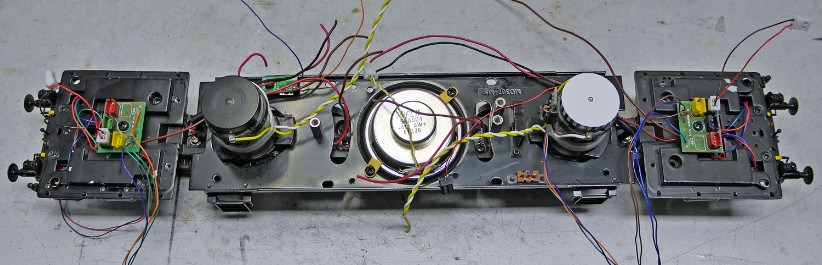
Dann die originale Elektronik entfernen. Auf dem Bild oben ist alles zu sehen, was davon übrig bleiben sollte. Die schwarzen und braunen, etwas dickeren Kabel führen zu den rechten und linken Gleiskontakten. Die roten sind für die Schleifkontakte der 3Leiter-Version und werden abgekniffen. Die Kabel gehören an die zwei dreipoligen Stecker für den Gleisstrom.
Von den Platinen auf den Vorbauten kommen insgesamt sechs dünne, farbige Drähte. Der schwarze und der rote führen zur elektrischen Kupplung. Der violette ist der Minuspol (GND). Der orange und der blaue führen jeweils zu den roten LED der Beleuchtung. Intelligenterweise verwendet MTH für das weiße Licht und für die Führerstandsbeleuchtung dieselben Farben, nämlich jeweils braun und grün. Das einfachste ist, beides auf gut Glück anzuschließen und später ggf. zu vertauschen.
Die Motorleitungen sind leicht zu finden. Die gelbe Leitung gehört an Motor- und die weiße an Motor+. Der Motor mit den Zebrastreifen auf der Schwungmasse ist der vordere Motor (Führerstand 1).
Die zwei dünnen, gelben und weißen Kabel kommen vom Lautsprecher und werden mit den äußeren Kontakten eines dreipoligen Steckers verbunden.
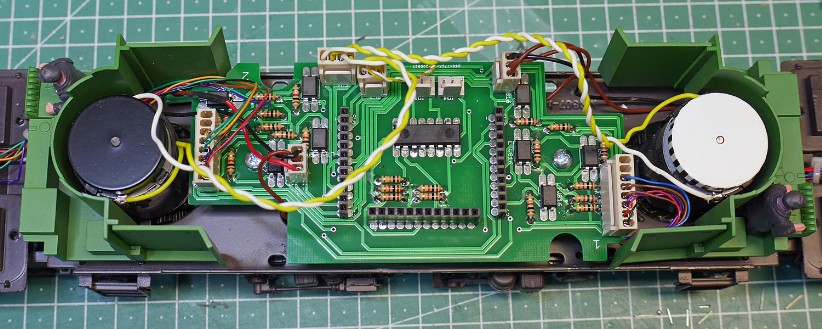
Auf dem nächsten Bild sind schon alle Kabel an die Stecker angeschlossen, die Decoderplatine liegt daneben.

Die Kabel werden nach diesem Plan an
die Stecker angeschlossen.
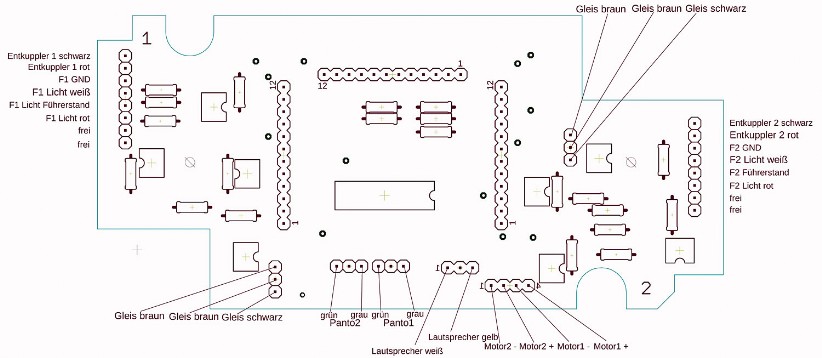
Wie die Kabel an die Stecker
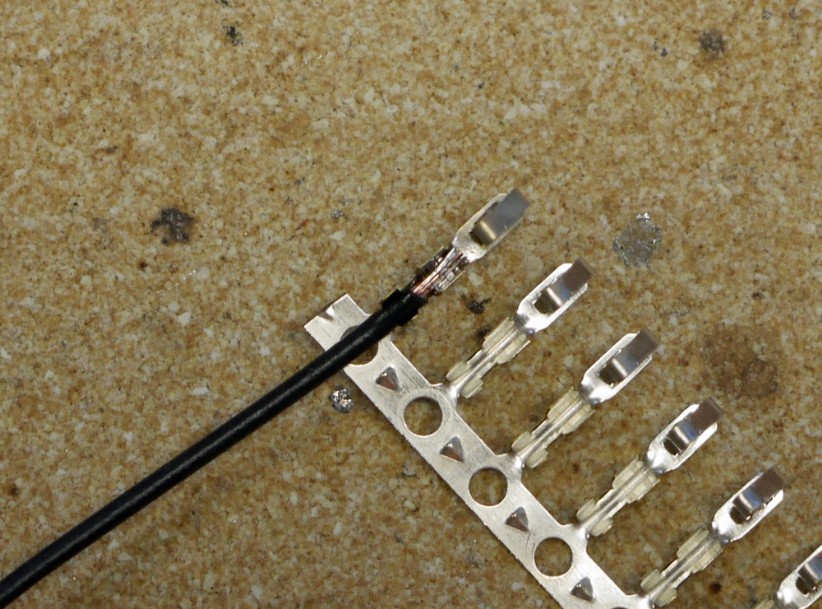
angeschlossen werden, zeige ich hier. Als erstes werden die Steckkontakte
verzinnt.

Das Kabel wird angelötet.
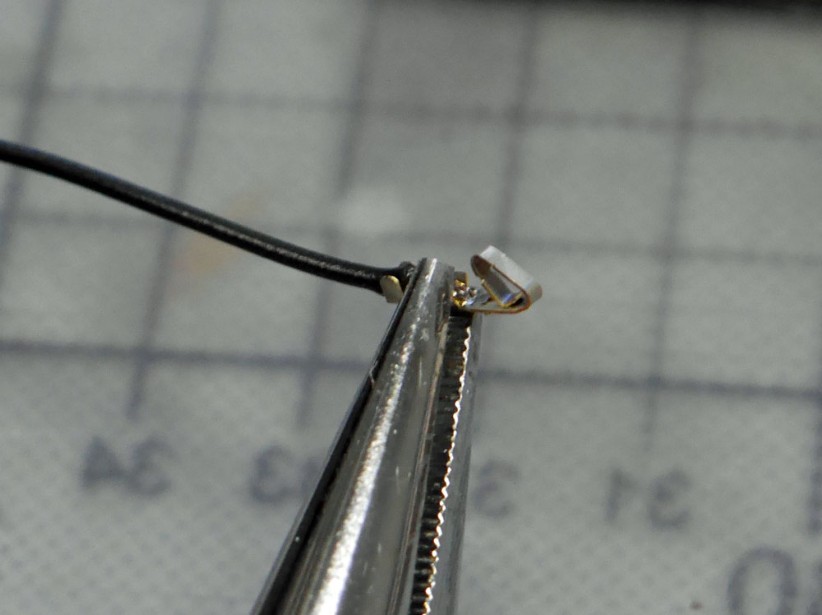
Der Kontakt wird abgetrennt.

Das
überstehende Teil wird abgetrennt.

Die Laschen des Kontakts werden mit
einer spitzen Zange zusammengedrückt.
Der fertige Kontakt.

Und in das Steckergehäuse geschoben,
bis er einrastet und festsitzt. Ein kleiner Schraubenzieher hilft dabei.

Der fertige Kontakt im Gehäuse. Möchte man ihn wieder herausziehen, muss die Rastnase mit einem spitzen Gegenstand zurückgedrückt werden.
Jetzt kommen die Vorbereitungen zum
Einbau der Decoderplatine. Als erstes muss wegen Kurzschlussgefahr der
überflüssige Stehbolzen (gelber Pfeil) entfernt werden. Die Schraube, die ihn
von unten hält, wird am besten mit einer spitzen Zange festgehalten und der
Bolzen mit einem 5mm Steckschlüssel abgedreht.

Die Befestigungsschrauben des
Lautsprechers müssen gelöst und der Ring, der lose unter dem Laudprecher liegt,
entfernt werden. Danach wird der Lautsprecher um 180 Grad gedreht wieder
eingebaut, weil sonst das Kabel zu kurz ist. Die Klammern, die den Lautsprecher
halten, müssen etwas umgebogen werden, weil sie sonst den Lautsprecher nicht
halten können, siehe Foto.
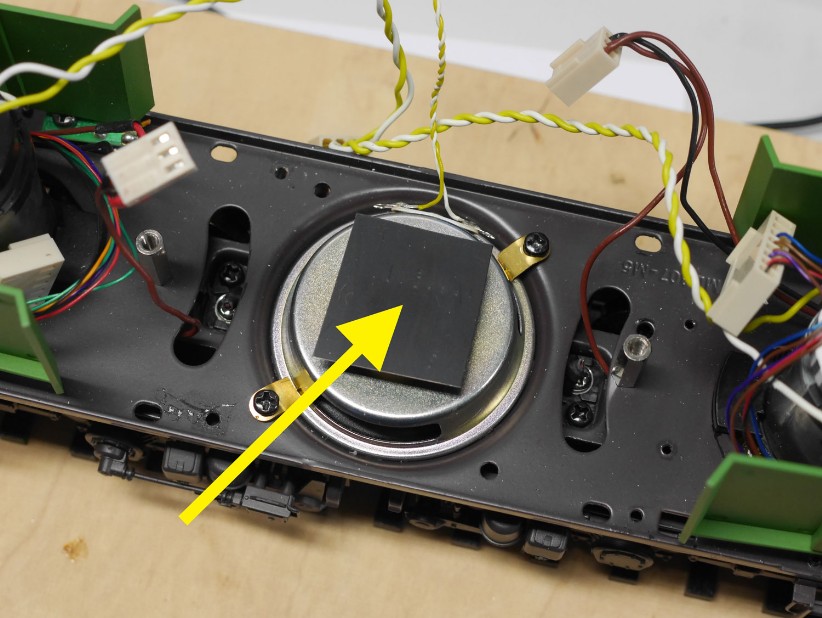
Alsdann muss ein Stück 0,5 mm
Polystyrol auf den Lautsprechermagneten geklebt werden. Das ist sehr wichtig,
weil ein Kurzschluss zwischen Lautsprecher (= Chassis) und Platine den Decoder
kosten kann. Isolierband darf nicht verwendet werden, weil die spitzen
Anschlüsse der Bauteile dieses durchdringen könnte.
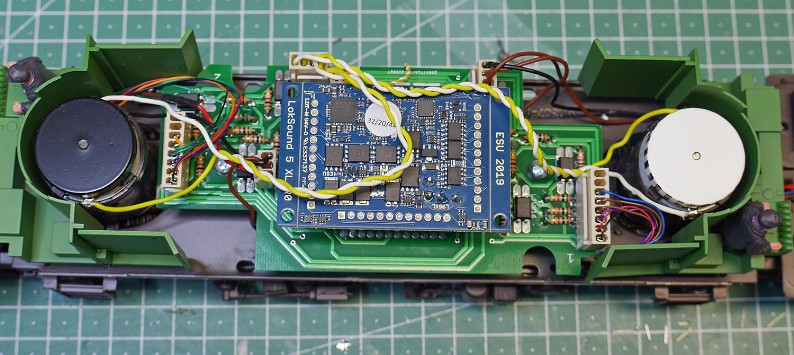
Nun kann endlich die Decoderplatine
eingebaut werden. Unbedingt auf die Zahlenmarkierungen auf der Platine achten.
Die eins zeigt dahin, wo der Motor mit der weißen Schwungscheibe ist.
Allerdings passt die Platine anders herum auch nicht in die Lok. Anschließend
werden die Stecker, so wie im Foto zu sehen, aufgesteckt. Die zwei leeren
Stecker sind für die Pantografenantriebe. Schließen Sie diese nach dem
Anschlußplan an.
Nach einer sorgfältigen Kontrolle
aller Anschlüsse kann der Decoder aufgesteckt werden. Es ist darauf zu achten,
dass an der Seite des Decoders, an der 14 Stifte sind, je ein Stift links und
rechts von der Steckerleiste frei stehen. Der Decoder kann prinzipiell nicht
verkehrt herum aufgesteckt werden. Für die vier Dreiergruppen von Kontakten
gibt es keine Buchsen auf der Platine, dort können aber Servos angesteckt
werden, wenn die originalen Pantografenantriebe nicht verwendet werden sollen.
Schließlich muss der Decoder noch programmiert werden. Als erstes wird die Sounddatei geladen. Diese findet sich auf der ESU-Webseite unter http://projects.esu.eu/projectoverviews/search?cat=7&q=e94 Klicken Sie auf "Download" und dann nochmal auf das kleine Fenster, das sich öffnet. Sie sehen dann den Lizenzvertrag. Scrollen Sie runter bis zum Ende und Klicken Sie auf "Akzeptieren/Download" (nachdem Sie die Bedingungen gelesen und verstanden haben :-)
Die heruntergeladene Datei speichern Sie, z.B. auf dem Desktop.
Starten Sie dann den ESU-Programmer. Klicken Sie auf "Datei" / "öffnen" und wählen Sie die heruntergeladene Datei. Die Benutzeroberfläche des Programmers sollte sich öffnen. Klicken Sie dann auf "Programmer" / "Sounddaten schreiben". Wenn alles in Ordnung ist, werden die Sounddaten auf den Decoder geschrieben, das dauert einige Zeit.
Zuletzt muss noch die Programmdatei auf den Decoder geschrieben werden. Diese finden Sie hier. Klicken Sie auf den Link und wählen Sie einen Speicherort. Doppelklicken Sie dann auf die gespeicherte Datei. Diese wird im Programmer geöffnet und - nachdem Sie auf "Programmer" / "Decoderdaten schreiben" geklickt haben -auf den Decoder geladen.
Laden Sie dann die Funktionstastenbelegung herunter und testen Sie alle Funktionen.
Abschließende Tests haben ergeben, dass die Lok mit den Originalmotoren gute Fahreigenschaften hat, ein Umbau ist nicht erforderlich. Sie zieht wie ein Ochse. Um die Stromaufnahme zu testen habe ich folgende Fahrversuche gemacht:
- Lok solo auf ebener Bahn: 0,4A
- Lok mit 29 Güterwagen auf ebener Bahn: 0,8A
- Lok mit 29 Güterwagen in 2,5% Steigung mit R1-Kurven: 2,0A
- Lok schleudert: 3,0A
Dabei ist die Lok in der Lage, mit den Güterwagen in der Steigung ohne Schleudern anzufahren, das schafft keine meiner Lenz-Loks. Die 50er Kab schleudert z.B. ganz erbärmlich und bringt den Zug nicht von der Stelle. Zugegeben, dafür ist sie vermutlich auch nicht gedacht.
Schließlich habe ich die Lok noch patiniert. Leider habe ich davon nur wenig Bilder, die vorhandenen solt Ihr hier sehen:




Damit ist wieder ein spannendes Umbauprojekt abgeschlossen.